
Unified Spherical Frontend: Learning Rotation-Equivariant Representations
In Submission (2025)
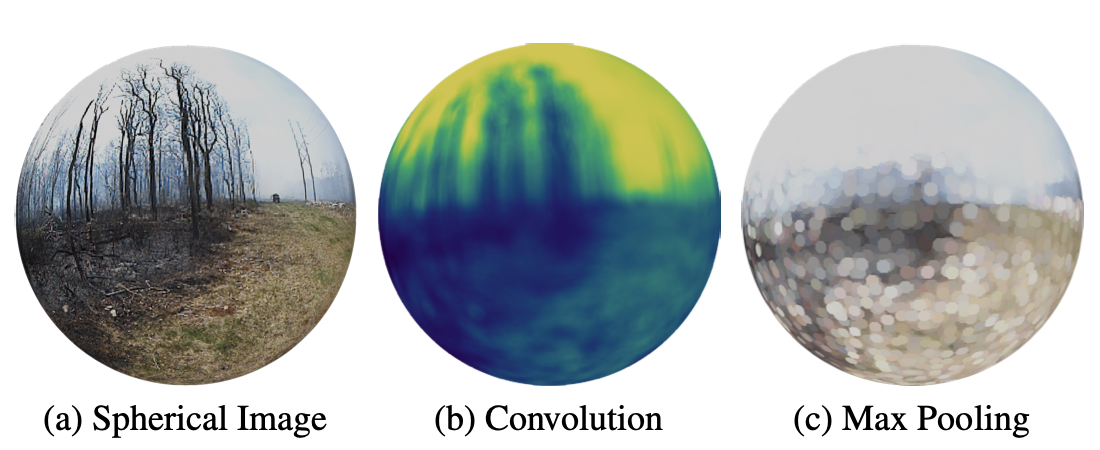
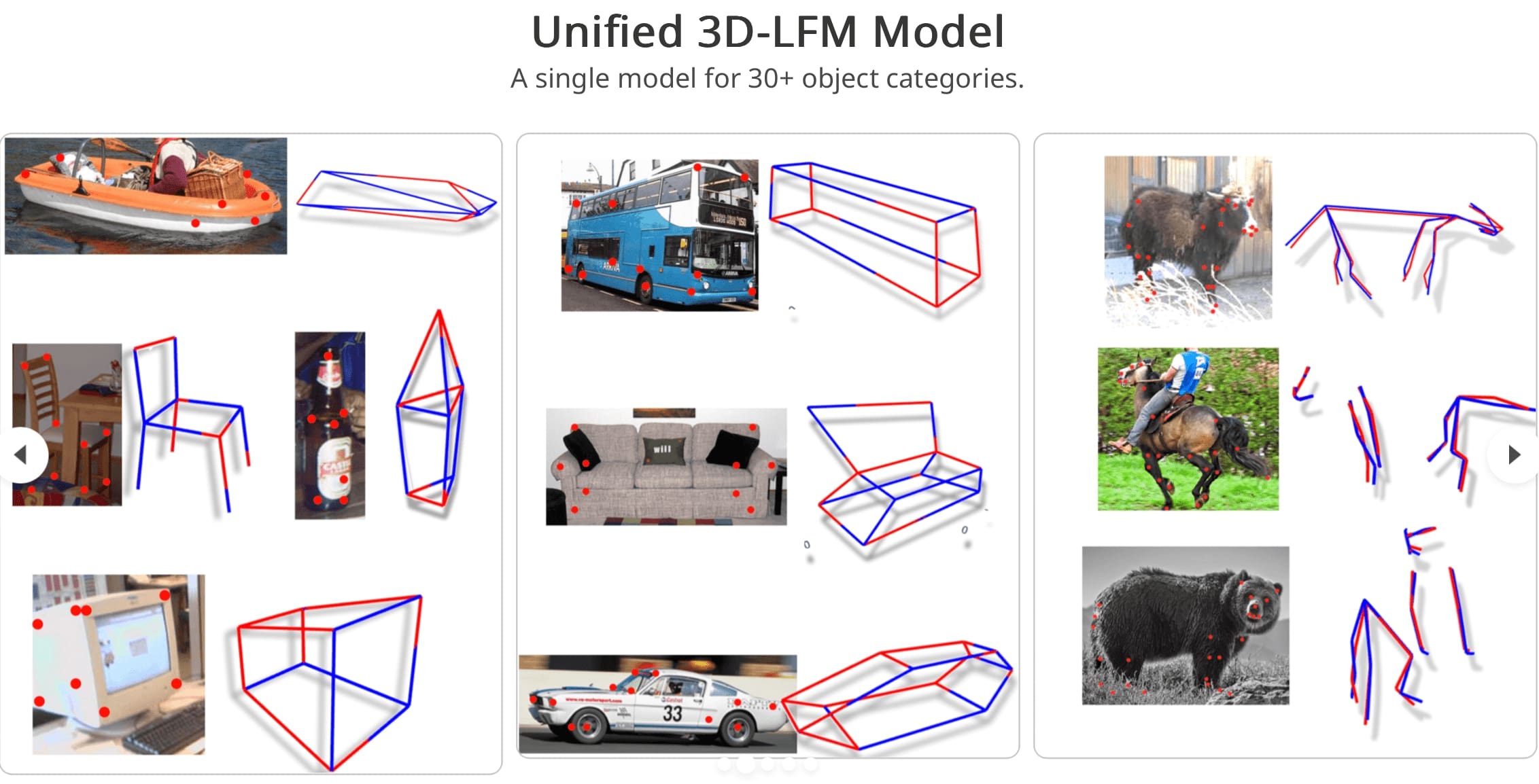
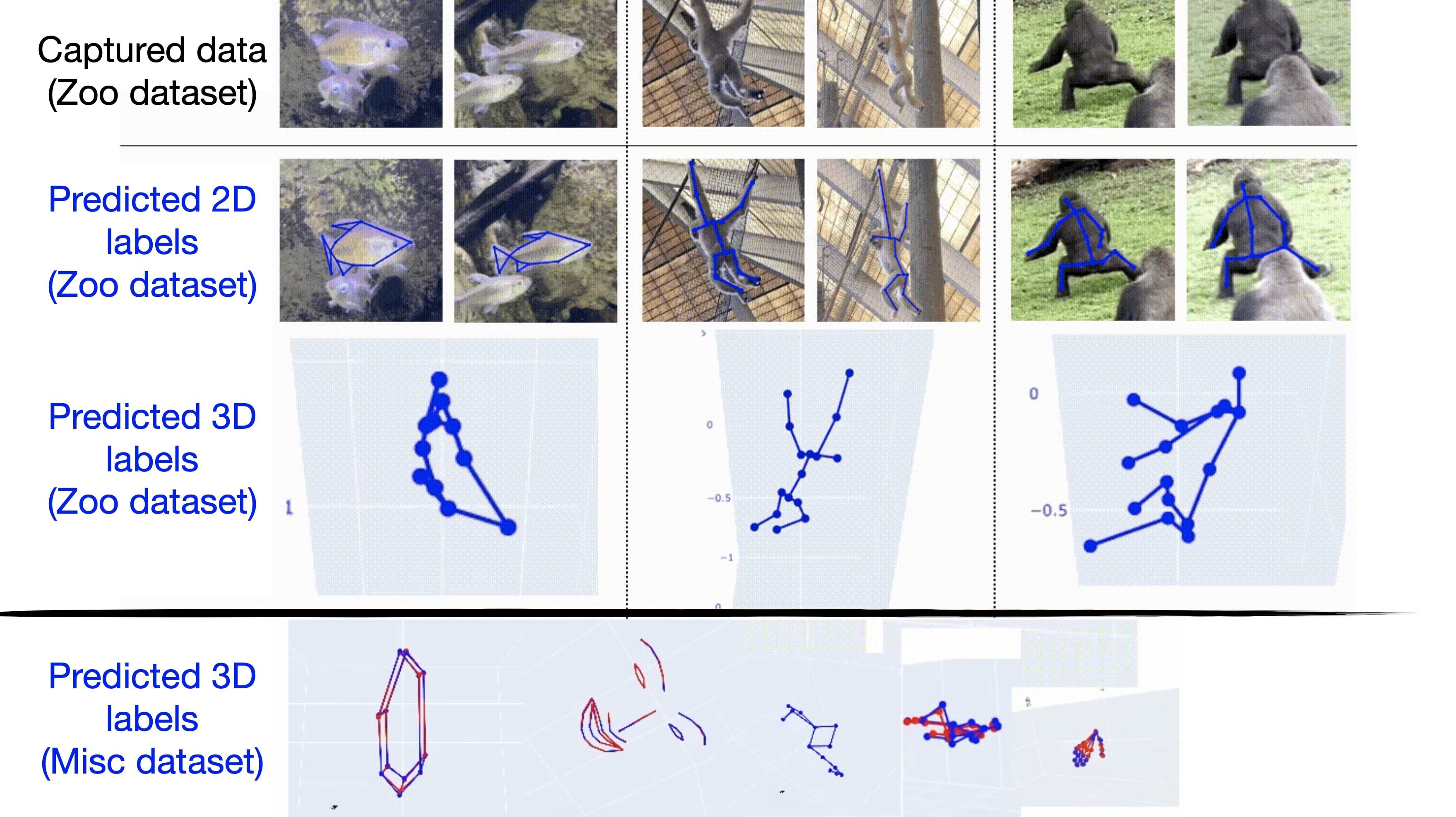
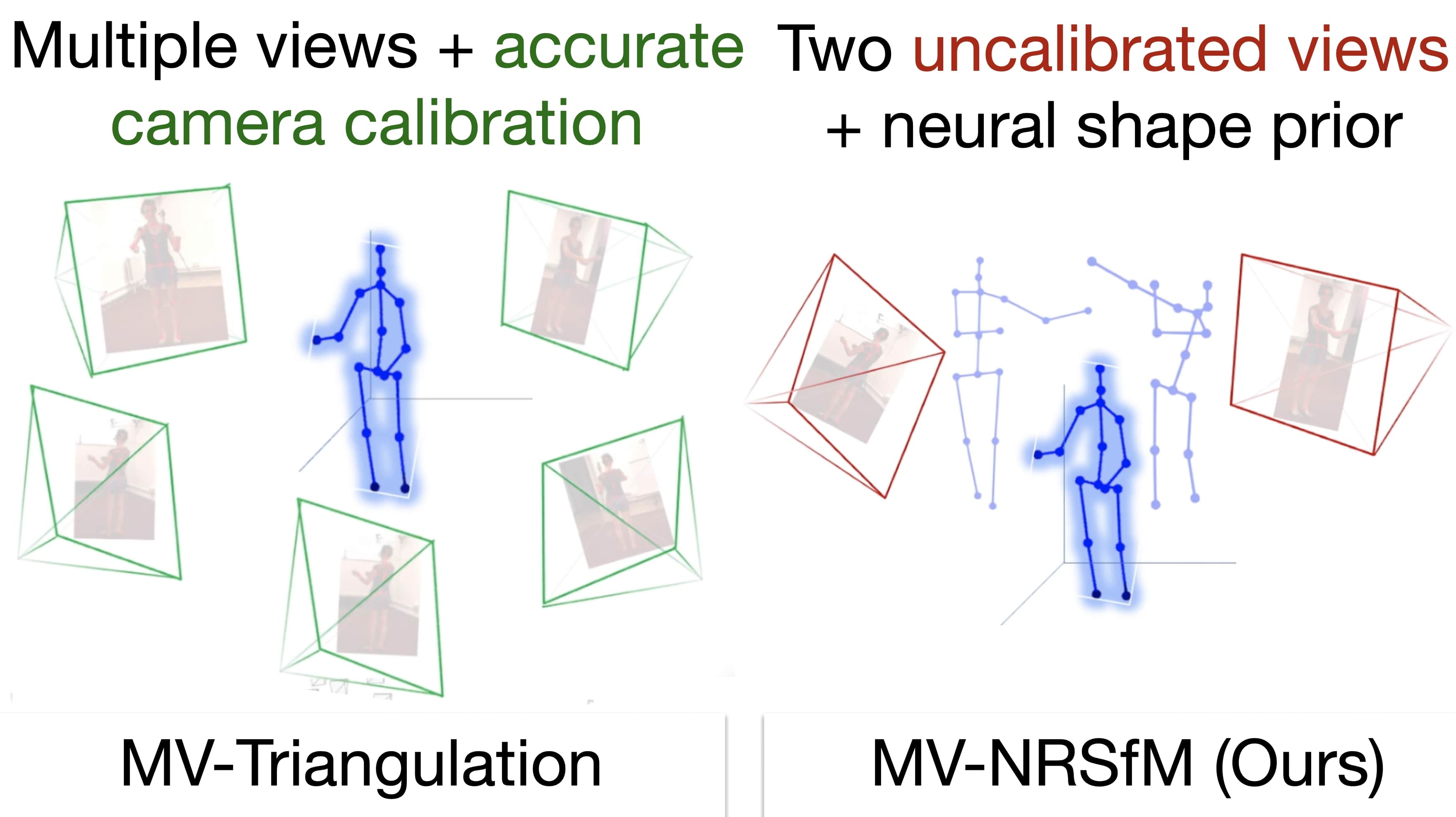
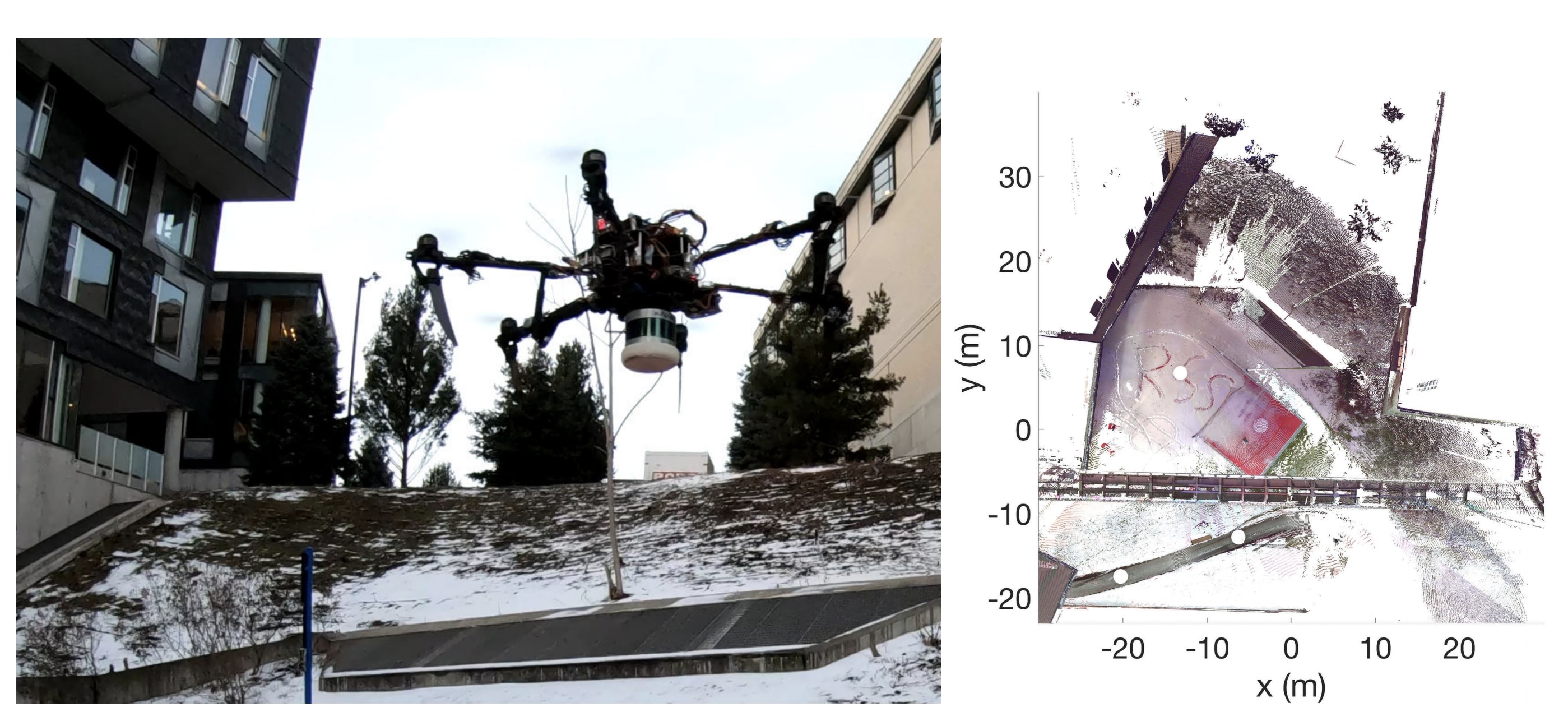
A sensor-agnostic vision frontend that maps any camera geometry: fisheye, pinhole, or 360° into a unified spherical representation. This architectural invariance enables perception systems to deploy across diverse hardware platforms without retraining.

{kind=link}